Stanford engineers have built a robot scuba diver that’s just the sort of sturdy, sensitive sort that you need if you want to pick your way through a coral reef or a decaying shipwreck. Named Ocean One, the robot commands some of the most human like qualities of any remote-controlled machine designed to withstand ocean pressures at depths of hundreds of meters.
Ocean One transmits sensations back to its operator for delicate explorations
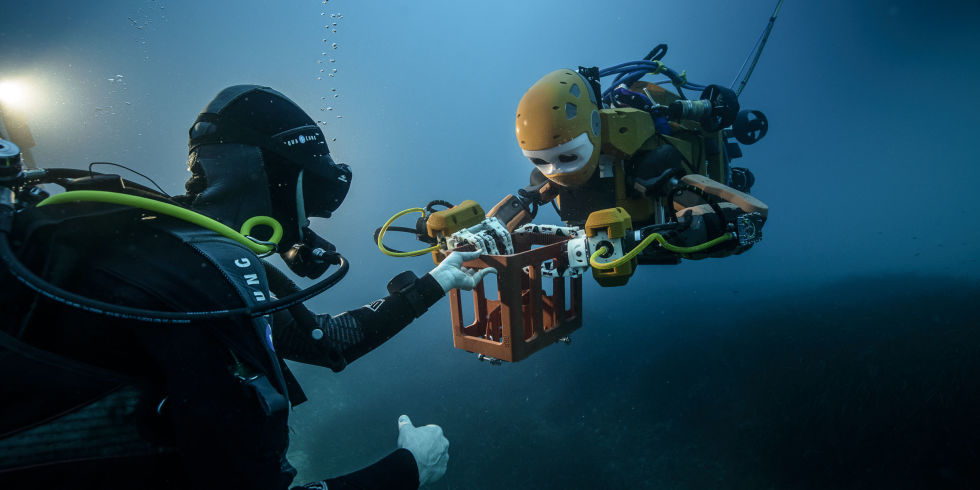
The robot’s key traits: OceanOne is roughly person-sized (about 5 feet long), has binocular vision in a head that looks like Mega Man’s, and trawls the deep with the use of two arms and hands that send back haptic data to its operator. This allows a person controlling Ocean One with joysticks to feel, roughly, the weight of the objects the robot’s picking up. The computer scientist leading this project, Oussama Khatib, uses the word “avatar” to describe the relationship between the operator and Ocean One. Its seems apt, and it opens up a different frontier, perhaps, in how we explore the deep. More than a mere drone (no offense, Sentry) or a chunky human-occupied pod Ocean One is nimble, tactile, and seemingly intuitive. It can comb a fragile environment, in tight confines, and report its findings directly into the hands of its guide. Khatib told Stanford’s news service: “You can feel exactly what the robot is doing. It’s almost like you are there; with the sense of touch you create a new dimension of perception.”
Its maiden voyage into the live ocean was to prowl a La Lune, a frigate of Louis XIV’s that sank off the southern coast of France in 1664 and was rediscovered only in 1993, some 300 feet below the surface. French underwater archaeologists have been probing the site for years, but it’s still striking to see OceanOne hustle down and retrieve a vase, with Khatib at the controls. No wonder the scientist hopes to build a small team of these robots in the near future. Watch the Ocean One.
No comments:
Post a Comment